中山大学空中机器人队成立于2015年12月,于2017年首次参加国际空中机器人竞赛,曾获得“系统控制”一等奖、创新设计奖,并在2019年的任务8中取得了亚军的成绩。空队历届由10多位本科生作为主要成员,目前,空队正在致力于完成IARC第9代挑战任务中。


国际空中机器人竞赛(International Aerial Robotics Competition)是世界上运行时间最长的大学空中机器人挑战赛。在过去的 25 年中,IARC 通过其七项在首次提出时“不可能”完成的挑战任务,多次推动最先进的空中机器人技术向前发展。您可以在IARC官方网站了解包括历届大赛的具体规则在内的更多信息。



任务背景: 未来世界被超级AI所统治,幸存的人类联盟在对抗AI的战争中,需要派出空中机器人秘密更换一艘AI猎杀船上的关键零件。
实际任务中,我们需要设计一款带有机械手、滑轨等机械运动装置的自主空中机器人,携带2kg重零件,穿越3km的航程,识别到目标桅杆,将其上原有零件替换为空中机器人携带的零件,随后返回任务出发点,整个过程需要在9分钟内完成。特别需要注意的是,目标桅杆将会不规则的前后左右摆动,其上有着强电磁,旋转摆臂等对无人机“致命”的干扰。
灵巧的飞行器如何克服剧烈的抓取动作以及外界带来的干扰? 如何准确的抓取一个在不规则运动中的物体? 如何做到厘米级甚至毫米级的飞行控制精度与空中抓取精度? 一个个前所未有的“不可能”的任务!
任务难点: 1. 抓取任务 △ 2kg大型物体抓取 △ 抓取处于不规则运动中的物体 △ 高精度物体操纵 2. 飞行任务 △ 长距离户外快速作业 △ 携带重物且重心严重偏移 △ 克服抓取带来的强力干扰 △ 高精度飞行控制
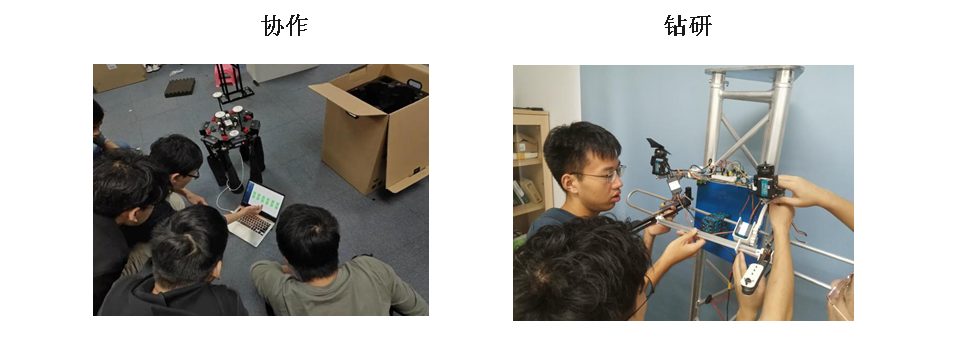
我们针对各个难点,成员合理分组为飞控组、机械组、视觉组、场地建设组 在指导老师的带领下! 正在不断尝试、挑战中......
正在进行多次实际飞行测试以不断完善我们的整体方案
超过十支来自不同国家的队伍正在任务9挑战中一同竞争 我们的方案与更多细节暂不介绍
想了解我们更多?
现任队长邮箱:Zhangbt6@mail2.sysu.edu.cn
完成长距离航程任务

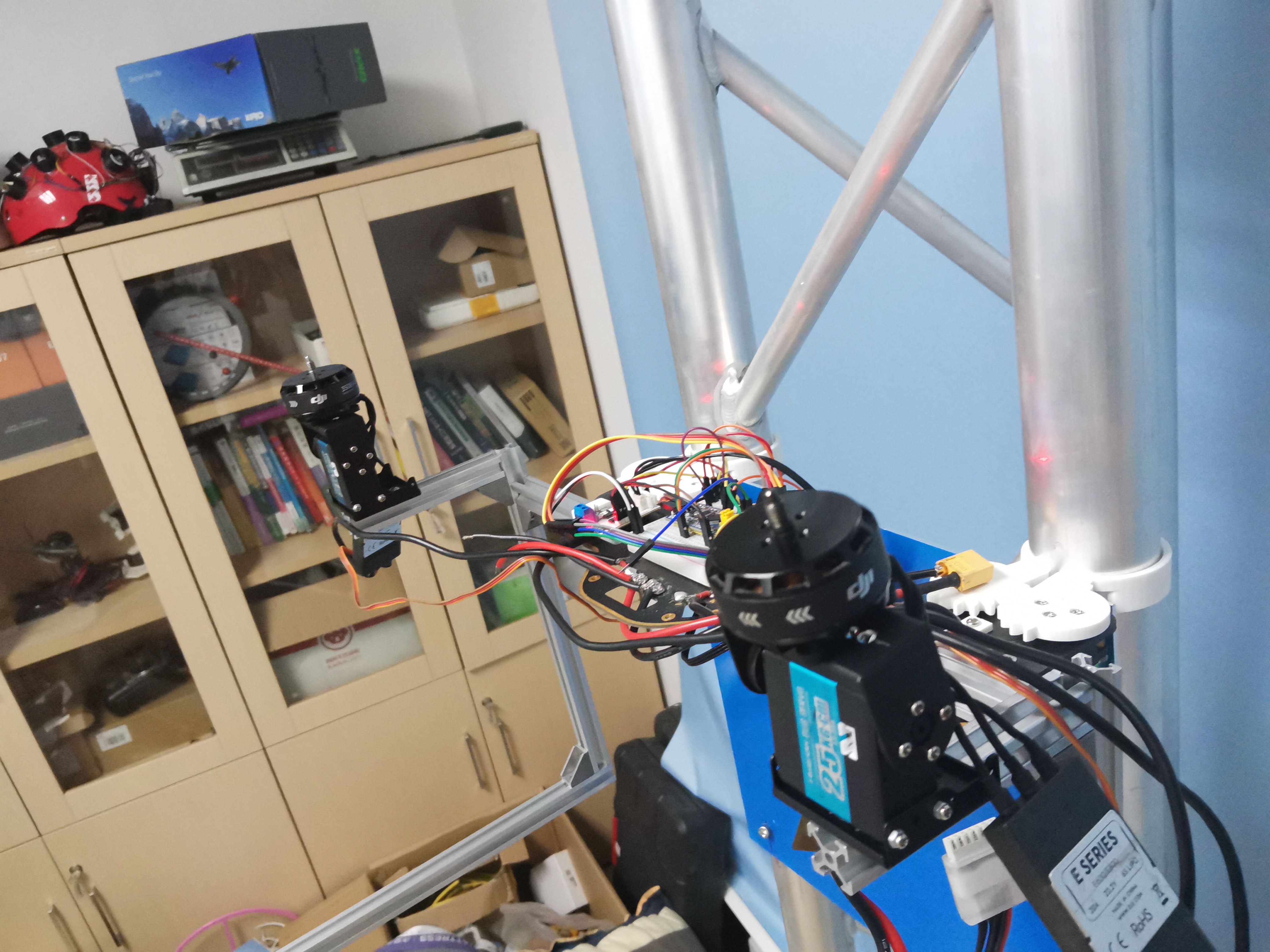
完成抓取平台建设
烈日下队员正在测试飞行

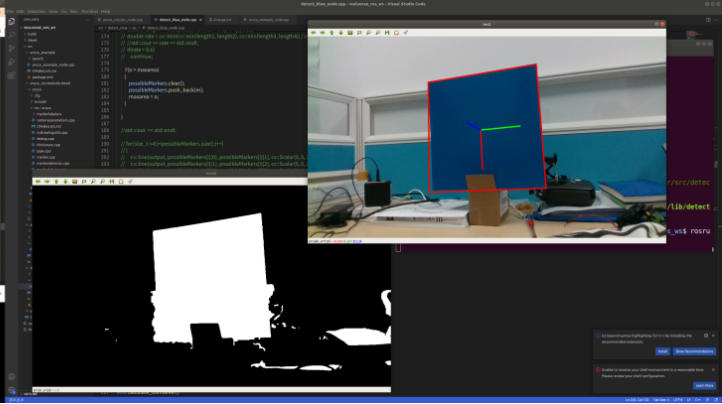
完成蓝色板块目标的光学识别

任务重点: △ 人机交互合作 △ 多机交互合作 △ 光学识别的二维码拼接 △ 躲避障碍
概要:参赛者需要在自主研发的多架空中机器人助手协助下,进入场地找到组件,在不被哨兵空中机器人攻击杀死的情况下将它取回。空中机器人助手只接受手势、语音命令,且需要完成识别密码、自主避障、补给等操作。我们方案的关键技术包括了室内定位采用了UWB+IMU+光流融合,残缺二维码密码拼接识别采用了图片特征提取和拼接,编队决策采用了主次机方案进行指令多层解析。
2019年IARC 亚军
任务重点: △ 无外界辅助导航(可使用光流) △ 与其他空中机器人互动
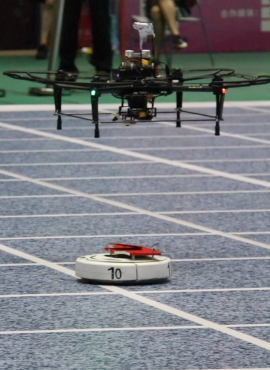
概要:空中机器人完全依靠自身的导航与控制技术围堵和控制地面移动物体到比赛场地的指定区域。这需要空中机器人具有智能全局观察与规划策略,室内自主导航技术和高性能的飞行控制技术,在这些技术得到验证后,最终实现与其他地面机器人的博弈行为。我们方案的关键技术包括了足够精细的飞行控制策略,室内自定位采用了数据融合+光流+格子检测,地面目标检测采用KCF跟踪,避障采用人工势场法等。
2017年IARC “系统控制”一等奖 2018年IARC 创新设计奖

中山大学逸仙狮机器人队创建于2016年10月24日,由多名来自计算机学院、电子与信息工程学院、电子与通信工程学院、航空航天学院、智能工程学院、传播与设计学院等学院的本科生组成,并由成慧老师担任指导老师。队伍内设置了多个小组,准备与参加Robomaster机器人大赛。致力于解决与大赛相关的机器人领域难题,培养机器人工程师。
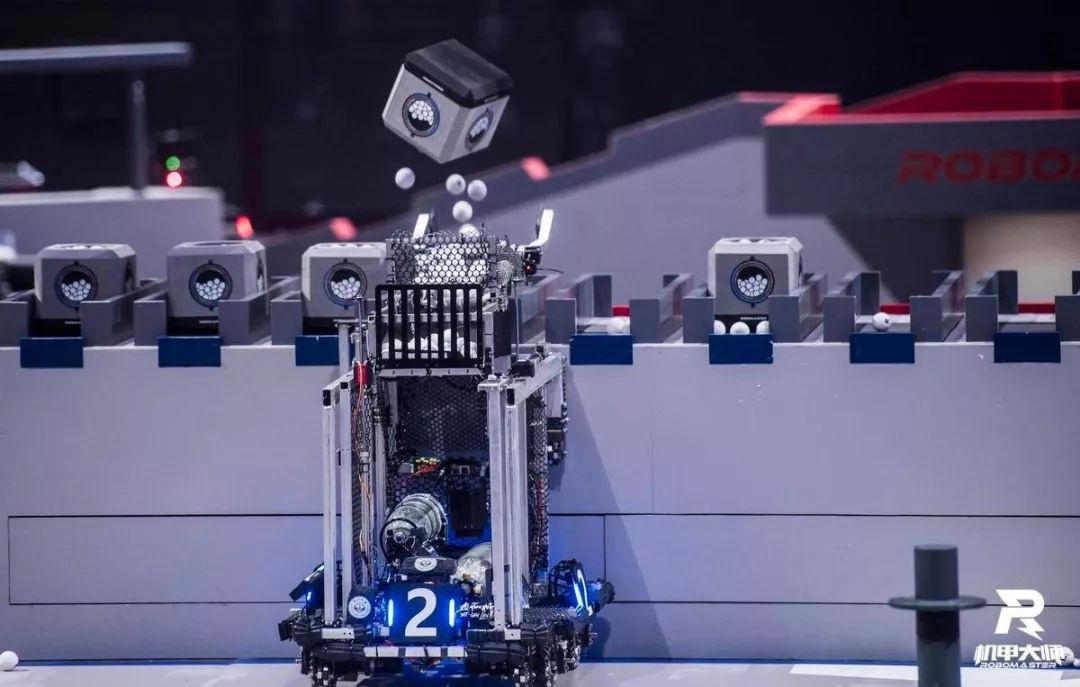
大赛介绍:Robomaster机器人大赛高校系列赛(RMU, RoboMaster University Series ),是由大疆创新发起,专为全球科技爱好者打造的机器人竞技与学术交流平台。自2013年创办至今,始终秉承“为青春赋予荣耀,让思考拥有力量,服务全球青年工程师成为追求极致、有实干精神的梦想家”的理念,致力于培养与吸纳具有工程思维的综合素质人才,并将科技之美、科技创新理念向公众广泛传递。 平台要求参赛队员走出课堂,组成机甲战队,自主研发制作多种机器人参与团队竞技。他们将通过大赛获得宝贵的实践技能和战略思维,在激烈的竞争中打造先进的智能机器人。
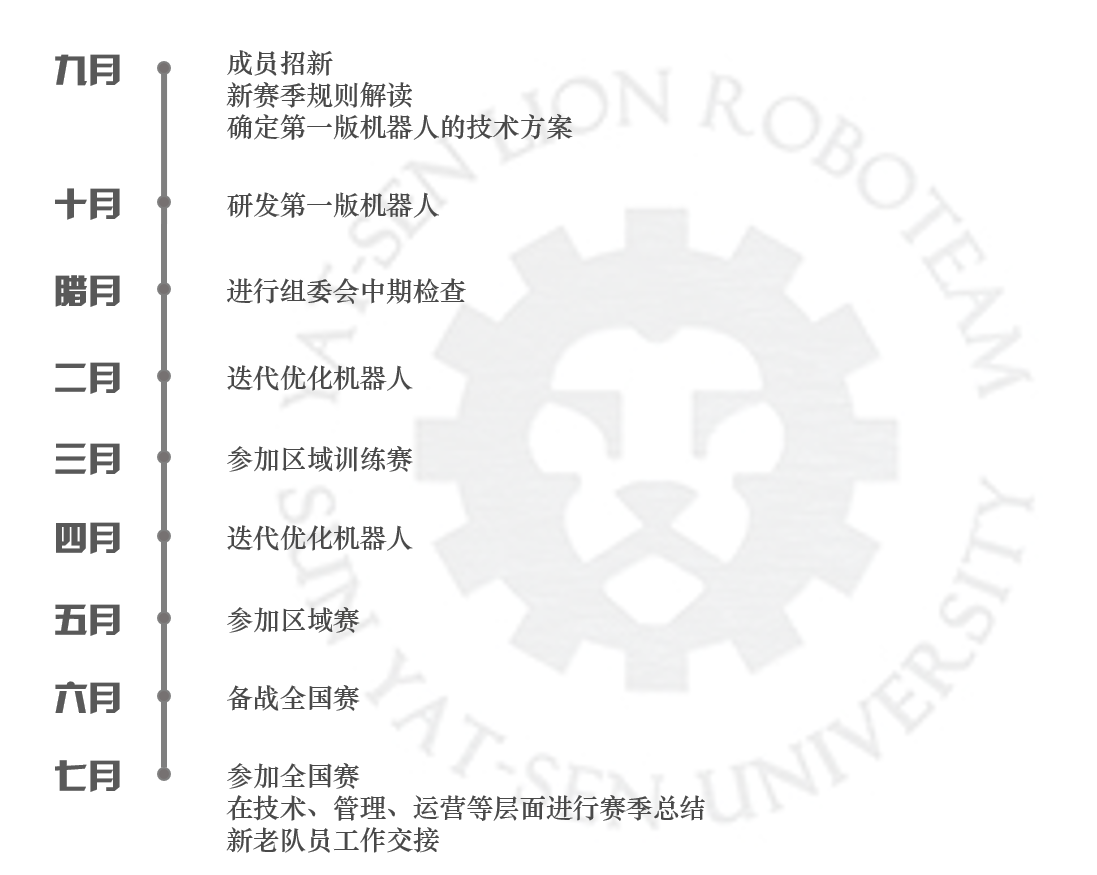
中山大学逸仙狮机器人队致力于参加一年一度的Robomaster机甲大师赛,队伍以年为周期安排活动,制定时间轴。



机械组根据赛事相关规则指定机械技术方案,进行机械设计、加工、装配。工作模式为: 1)根据功能队内进行结构选型讨论; 2)sw上进行结构设计,必要时进行仿真测试; 3)使用3d打印机打印,进行结构测试; 4)送厂加工或打印; 5)装配测试。
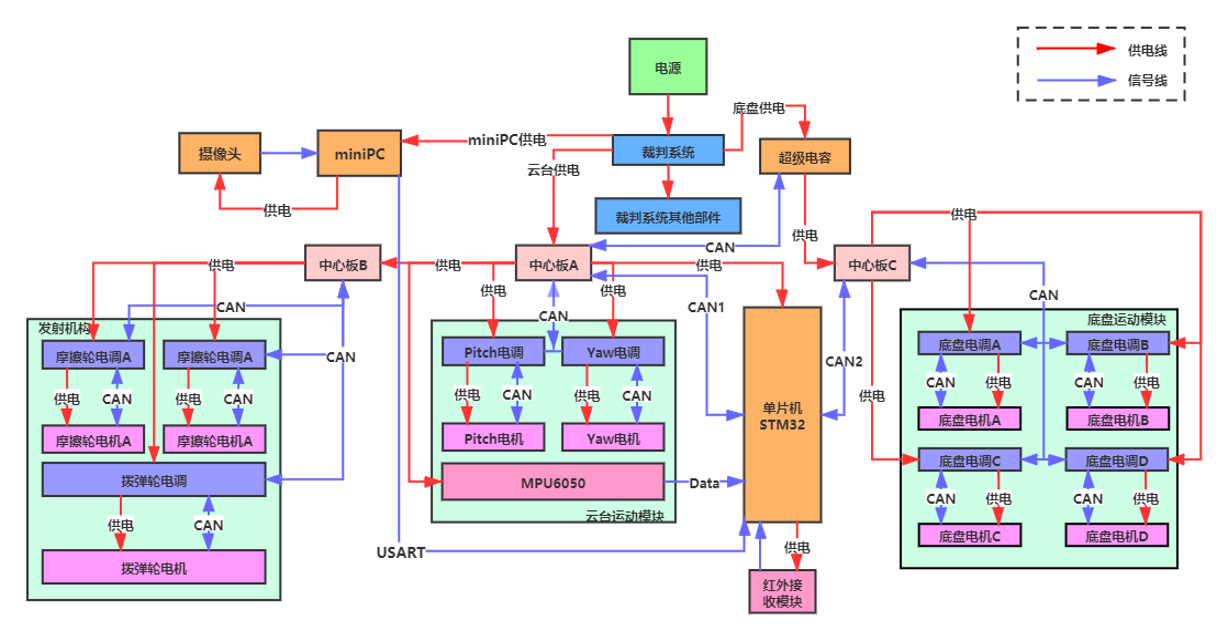
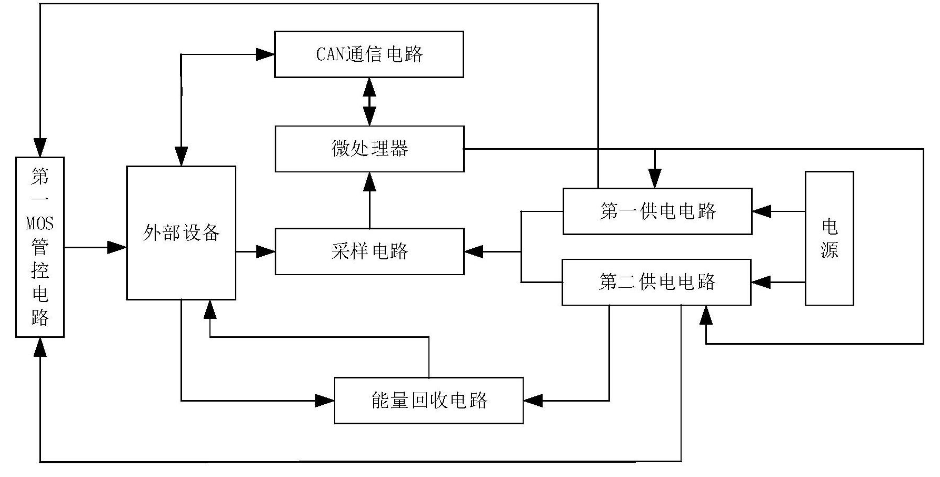
电控组为机器人设计适配机械结构和视觉算法的嵌入式系统, 实现机器人底层感知与控制。主要设计与实现的内容有: 1)动力系统,包括赛事规则允许的电机驱动、气缸动力等; 2)感知系统,基本感知模块为电机编码器和陀螺仪; 3)能源系统,研发超级电容模块; 4)控制系统,调试机器人基本运动控制。
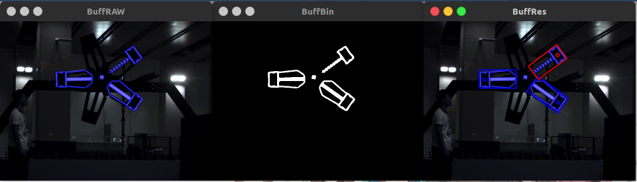
视觉组将计算机视觉硬件和软件部署到机载平台,智能化机器人。 例如,当步兵机器人具备目标检测的能力时,它就能够识别规则相关的赛场机关、 敌方机器人装甲板等进行射击,提升战斗能力。
宣传组1负责队伍的日常运营工作,包括: 1)记录队伍日常研发过程; 2)策划团建活动,增强团队凝聚力; 3)队伍的在各个平台的宣传、招商,同时完成组委会对应的运营指标; 4)经费统计、管理与上报。


| 第十九届全国大学生机器人大赛Robomaster2020机甲大师单项赛 | 二等奖 |
| 第十八届全国大学生机器人大赛Robomaster2019机甲大师单项赛总决赛 | 三等奖 |
| 第十八届全国大学生机器人大赛Robomaster2019机甲大师单项赛南部赛区 | 一等奖 |
| 第十八届全国大学生机器人大赛Robomaster2018机甲大师赛南部赛区 | 二等奖 |
| 第十七届全国大学生机器人大赛Robomaster2018机甲大师赛南部赛区 | 三等奖 |
| 第十六届全国大学生机器人大赛Robomaster2017机甲大师赛南部赛区 | 三等奖 |
| 第十一届“金溢杯”智能车挑战赛 | 二等奖*2 |
| 2019年全国大学生电子设计竞赛广东省赛区 | 一等奖 |
| 2019年全国大学生电子设计竞赛广东省赛区 | 三等奖 |
黄琪枫,庄杰智,成慧,一种具有独立能量回收路径的超级电容系统,实用新型专利,授权,2020年5月,201921621443.7