自然界中的生物群体呈现丰富多样、灵活自如、和谐有序的群体运动场景,吸引众多学科领域的研究人员对生物群体的群体现象开展探索和研究。受生物群体的启发,构建由具有感知、计算与通信能力的单体机器人组成多机器人系统,研究如何利用个体的局部感知信息,以及如何通过邻近个体的相互作用,使多机器人系统能形成像生物群体(如鸟群、鱼群)一般具有适应环境变化的群体运动能力,是极具挑战性的研究问题。
实验室围绕多机器人系统的分布式自主协同开展研究,结合算法研究与实验验证的方法,探讨与研究动态未知复杂环境中群体的分布式协同决策机制、多机器人系统的分布式协同导航与协同主动感知方法、分布式群体追捕-逃逸策略等,提升多机器人系统的自主与智能化能力
协同决策是群体智能领域中的基础问题之一,主要关注多智能体决策问题中智能体行为间相互作用的机制,以及个体间相互作用对群体的宏观影响。针对协同决策问题的研究不仅有助于深入理解自然界动物群体的行为模式,更有助于设计和实现面向真实任务场景的自组织分布式集群机器人。
以传统的静态环境下动物群体协同决策模型为基础,考虑真实任务场景的动态性,结合Ising模型等典型的自组织系统模型,以及动态信心机制,实现智能体间的高效信息融合,有效削减环境不确定性对智能体的影响,最终帮助集群做出更优质的决策。
Fan Jiang, Hui Cheng*, Guanrong Chen, “Collective decision-making for dynamic environments with visual occlusions,” Swarm Intelligence, 16:7–27, Aug. 2021Video Paper
具备像生物群体一般具有适应环境变化的群体运动能力,是多机器人系统自主完成作业任务的重要前提和保障,分布式协同导航是实现复杂动态环境下多机器人系统自主运动的关键技术。
在未知复杂障碍物环境中运动时,多机器人系统需根据感知的场景信息以及群内个体之间的相互作用动态重构与形成集群结构,在运动过程中避免群内个体之间的碰撞以及与外部障碍物的碰撞,将多机器人系统安全导航至目标位置。而实际应用中,受机载感知与计算能力有限、存在视野遮挡、不确定环境扰动、通信距离有限且不稳定等多种因素的影响,使得多机器人系统在未知复杂环境中的导航问题更为困难。未知复杂环境中多机器人系统的协同导航问题,实验室研究动态环境中的协同规划与控制算法、分别基于优化控制与基于深度强化学习的分布式协同导航方法,旨在使多机器人系统具有机动灵活、适应变化场景的群体运动能力。
对于运动速度大于机器人最大速度的高速动态障碍物,现有的运动规划方法难以避免与之发生碰撞。 针对存在高速障碍物的动态场景,我们提出了一种双周期速度障碍算法,第一个周期预测有限时间范围内可能发生的碰撞,第二个周期预测超出该范围的后可能发生的碰撞。 只有当障碍物的移动速度大于机器人的最大速度时,才会进行第二个周期的预测。讨论了新算法的适用性要和计算复杂度问题。 仿真与实物实验验证了所提出的避障算法的有效性。
Zhongchang Liu, Zeyu Jiang, Tianye Xu, Hui Cheng*, Zhipeng Xie, and Liang Lin, “Avoidance of High-speed Obstacles Based on Velocity Obstacles”, Proc. of IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 7624-7630, May 21-25, 2018, Brisbane, Australia.Video Paper
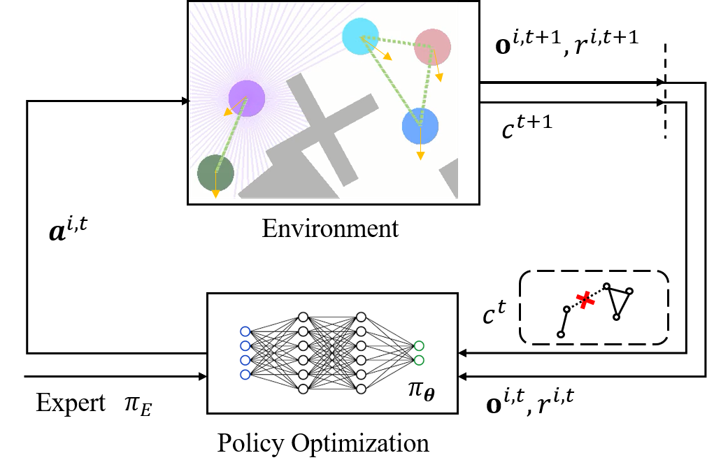
以强化学习为技术框架,在构建的多机器人仿真环境中训练导航策略。在考虑连通性约束的情况下,多机器人队伍需要导航到目标点的过程中避开障碍物,这样的类似多目标优化问题使得强化学习训练样本效率极其低下。针对导航学习过慢的问题,算法引入了单机规划的专家策略提升探索效率,并利用带约束的马尔科夫决策过程来有效保证连通性约束,最终训练得到有效策略。
根据环境信息搜索、优化得到连通起始位置和目标位置的一系列可以确保集群飞行安全的椭球可行域,并将椭球型可行域作为集群无人机飞行过程中的边界约束来动态调整集群结构,实现集群无人机的队形自主切换与无碰撞飞行。
群体的追捕-逃逸问题需要综合考虑和设计协同决策与规划控制策略。针对动态场景中的群体追捕-逃逸问题,我们相应地分别设计了逃逸者的逃逸策略以及围捕群体的分布式动态合围策略,并通过仿真与实物实验对算法进行分析和验证。
在分布式协同围捕任务中,智能灵活的逃逸者能检验围捕策略的合理性与有效性,促使围捕策略的不断提升,同时在攻防转换场景中具有可扩展性。实验室为逃逸者设计了基于粒子群算法的逃逸策略,逃逸者逃逸者测得当前可感知的围捕者状态信息,预估围捕者下一时刻位置,粒子群算法优化下一时刻最佳偏航角,执行躲避动作,在围捕者未使用协同策略的追逃对抗场景中,逃逸效果明显。
分布式集群决策与控制的挑战在于如何利用局部非完全信息实现多智能体协同行为。针对分布式集群协同抓捕单一快速逃逸者问题,提出了多机制融合的行为驱动方法,在逃逸者速度高于追捕者,且追捕者感知、通信和偏航能力有限的情况下,追捕者集群可实现对高速逃逸者的协同抓捕行为。具体地,通过设计多种行为驱动函数赋予集群不同的行为趋向能力,并明确不同行为机制的触发条件,最终将分布式协同抓捕问题构建为带约束的多目标优化问题,集群个体可在不同情况下触发不同的行为机制组合,即相同情况下行为状态相同的个体可实现相互协同,以此实现集群分布式协同行为能力。最后,在数值仿真环境中构建Reach-Avoid Game对所提策略进行验证,结果表明,追捕逃逸速度比和追捕者集群密度是影响集群表现的主要因素,在速比一定时,设定合适的集群密度期望值可提升抓捕成功率并降低集群内部碰撞率。
针对多个快速灵活目标的合围任务,设计了基于潜在贡献的分布式围捕目标决策算法,使围捕集群的个体可以计算围捕者对被围捕目标的潜在贡献,确定围捕目标优先级,从而动态选择围捕目标;当确定围捕目标后,围捕者根据基于占据角的协同围捕控制算法形成围捕队形,最大化围捕集群的有效占据角,实施协同围捕行为。
多机器人系统在大面积的搜索救援、区域监控等领域具有广泛的应用前景,多机器人协同覆盖是实现这些应用的共性技术基础。考虑由通信与感知能力有限的移动机器人所构成的多机器人系统,机器人可具有不同的感知能力,我们研究多机器人系统以分布式协同的方式实现对未知环境的完全覆盖。为了提高机器人间的合作能力,引入了一种分布式协同的完全覆盖框架,将完全覆盖问题的形式转化为分布式约束优化问题,并设计了改进的最大和算法求解该分布式约束优化问题。在尽可能保证算法输出质量的前提下,该方法能将最大和算法的计算时间复杂度由指数级降至多项式级,极大地降低算法的计算复杂度。对最大化总覆盖面积问题、完全覆盖问题及存在危险区域的完全覆盖问题进行了大量的数值仿真实验,实验结果验证了所提出的多机器人完全覆盖算法的有效性。
Junxun Zhong, Hui Cheng*, Liu He, Fang Ouyang, “Decentralized Full Coverage of Unknown Areas by Multiple Robots with Limited Visibility Sensing”, IEEE Robotics and Automation Letters (Presentation at ICRA), vol. 4, no. 2, pp. 338-345, April 2019.
无线网络控制系统中,众多被控对象、传感器、控制器和执行器由网络连接,信号通过无线网络进行传输,存在数据丢包、网络时滞等问题,控制系统的性能和可靠性受网络环境因素的影响。网络控制系统中,多个被控系统可共享无线通信信道以提高频谱的利用率,此时,系统存在无线网络分配和竞争问题。研究了网络化控制系统的优化控制,将基于协议序列的MAC层协议引入了网络控制系统,设计了共享无线通信信道的多无人系统的状态估计算法与控制算法,有效提升了共享通信信道情况下多无人系统的控制性能。同时,我们开发了小车倒立摆实验平台,实验研究了共享无线网络的多个小车倒立摆的网络化控制。
H. Cheng, Y. S. Chen, W. S. Wong, Q. Yang, L. F. Shen and J. Baillieul, “Stabilizing and Tracking Control of Multiple Pendulum-Cart Systems over a Shared Wireless Network,” in Proc. 31st Chinese Control Conf., pp. 5849-5854, July 2012, Hefei, China.